





*、爬壁机器人的工作原理
爬壁机器人是*种具有吸附力和推进系统的智能机器人,可以通过吸附、粘附、真空吸附等方式在垂直的表面上移动。这种机器人的工作原理主要是基于吸附力的原理。例如,当机器人需要在光滑的墙面上移动时,它可以通过真空吸附的方式在墙面上形成*定的负压,从而实现在墙面上自由移动。另外,*些爬壁机器人还可以通过轮式或足式运动的方式在垂直表面上移动。
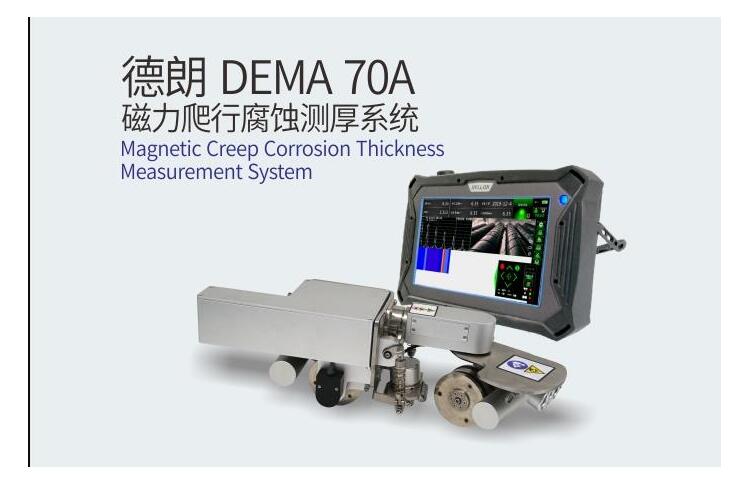
德朗科技研发生产的DEMA70A磁力爬壁腐蚀测厚系统,无需脚手架、无需打磨防腐层、无需任何耦合剂,即可通过远程控制系统实现高空壁厚腐蚀的快速检测。具有以下特点和功能:
1、磁吸稳定
使用稀土磁体制作高强度永磁轮,即使出现意外断电, 也不会发生车体从被检测表面掉落的危险。可以安全的进行水平、垂直和倒立等不同姿态的扫描工作。
2、控制精度高
行进速度0-6m/min无*可调,由程序编码器配合可设定检测间距。例如客户需要在弯头的正脊背位置,执行每50mm测*个点的间隔检测:即可控制器上进行设定,两轮磁爬即按照每50mm间距进行点检,大大提高检测的效率和精度。
3、实时视频监视
集成前视和后视双像机,在地面可对高空构件检测位置和路线 进行实时监视和调整,确保扫查轨迹可控。 采用*进检测技术采用*进的自动爬行(电磁超声)壁厚腐蚀检测系统,检测精度与传统压电超声波不相上下。无需搭建脚手架、无需打磨防腐层、无需任何耦合剂,通过在地面远程控制,实现高空管壁腐蚀情况的快速定位筛查和密集扫描。确保检测精度,大大的提高检测效率,降低检测成本。
4、拥有探头升降技术
拥有探头升降机械控制,点检测厚时,需要在规定的相同间距点上进行测量。每?个点的数据都是在探头落在被测表面上所得,对被测物体做B扫描时,但如果遇到焊缝余高较大时,则需要将探头升起跨越。因此探头升降功能可以帮助得到准确的每个点的厚度值。
5、结构精巧、灵活性高
爬壁机器人小巧精美的外观,让其方便针对各类铁磁性管道和容器进行腐蚀检测。长387.5mm、宽135mm、高137mm、重量≤5.8kg,拥有两轮结构使其可以在直径100mm转弯半径为400mm的管道上自由行走,轻松通过 弯曲半径为100mm的弯头。
随着技术的不断发展,爬壁机器人将会具有更加智能的感知和控制能力,可以在更加复杂的环境中执行更加精确的任务。未来,这种机器人的应用*域也将会越来越广泛。